1.查看自己所需的版本
https://www.ros.org/reps/rep-2000.html#rolling-ridley-june-2020-ongoing
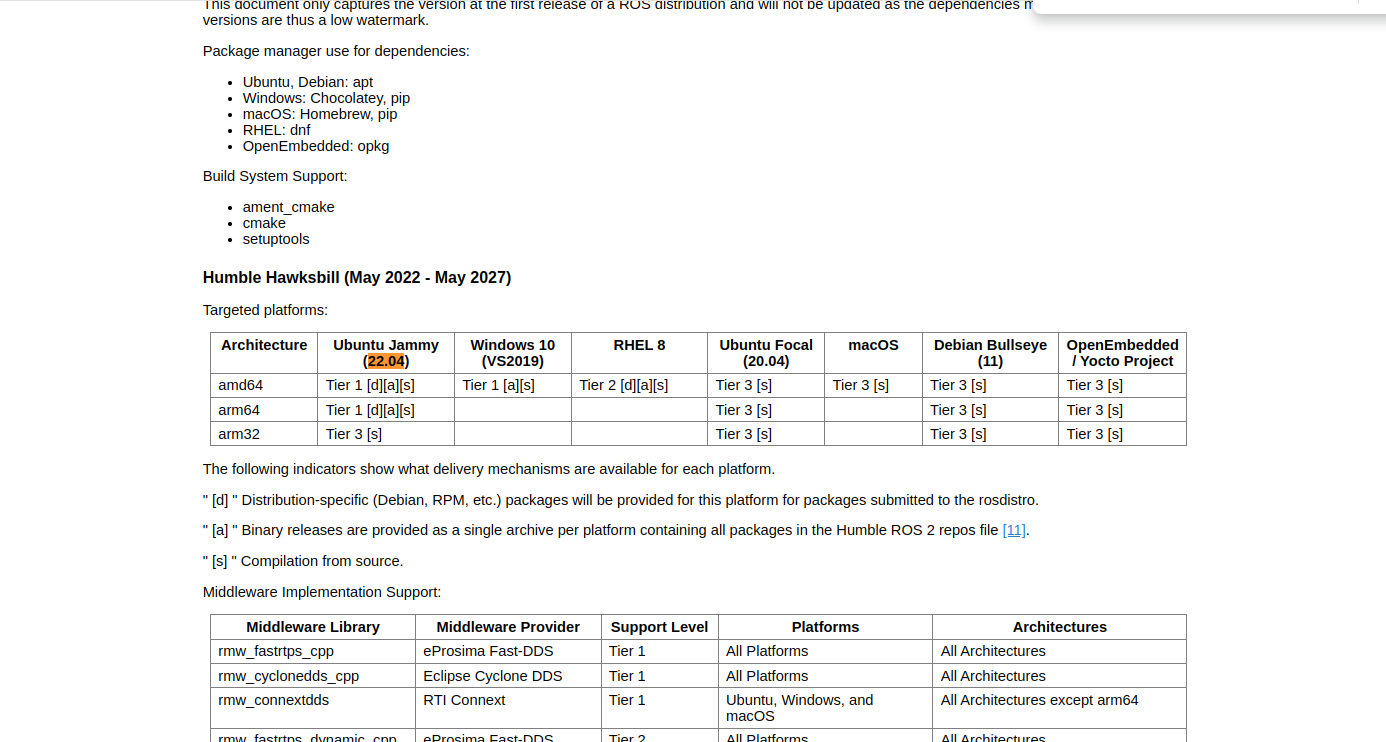
所以 Ubuntu 22.04 应该安装的ROS2版本为 ros-humble-desktop。
此外Ubuntu的版本号如果是带有LTS字样(Long Term Support),为长期支持版本,大家安装Ubuntu的时候应优先考虑此版本。
2.安装流程
2.1 设置locale
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2.2 直接安装ROS包
# 确保 Universe 仓库已启用
sudo apt install software-properties-common
sudo add-apt-repository universe
# 添加 ROS 2 GPG 密钥
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
# 添加 ROS 2 软件源
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
# 更新软件包列表
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
2.3 验证安装
设置环境变量:
source /opt/ros/humble/setup.bash为了避免每次打开终端都要手动运行此命令,可以将其添加到 ~/.bashrc:
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc检查 ROS 2 版本:
ros2 --version如果输出类似 humble,说明安装成功。
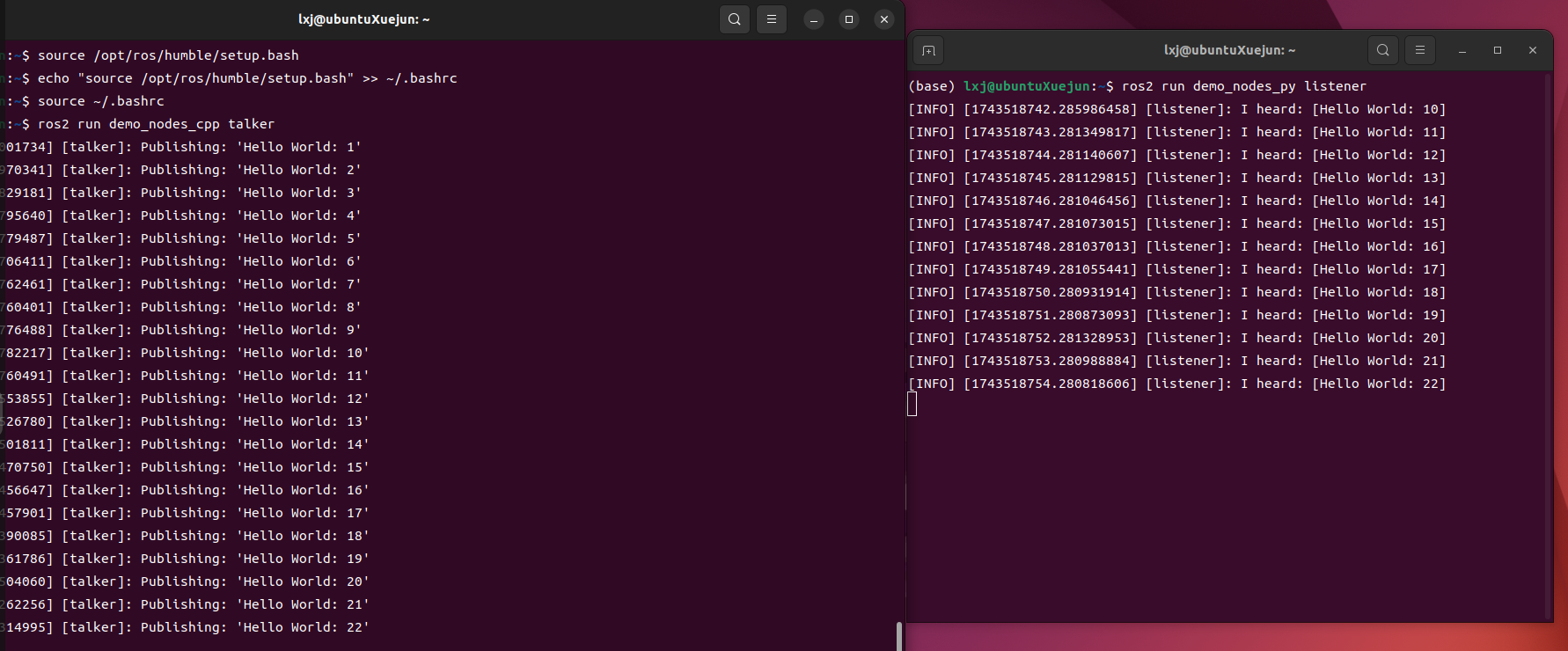
安装完成后,可以测试 ROS 2 是否正常工作:
启动一个简单的发布者:
ros2 run demo_nodes_cpp talker在另一个终端中启动订阅者:
source /opt/ros/humble/setup.bash
ros2 run demo_nodes_py listener如果可以看到消息传递,说明 ROS 2 已正常运行。
评论区